With the widespread adoption of automated production lines in enterprises, fully considering the maximum liberation of labor, improving production efficiency, and enhancing processing quality. It is planned to replace the manual sorting and packing of baked potato chips that was originally done by multiple people with robots, realizing efficient, flexible, and clean automated operations.
Product: Baked potato chips
●Shape: Oval or heart-shaped with a wavy surface. Orientation recognition is required during sorting.
●Weight: Approximately 1.5g per chip
●Dimensions: Diameter of approximately 45mm and thickness of approximately 2-3mm ?Production Line Efficiency: 350Kg/h (equivalent to 3889 chips/min)
●Infeed Conveyor Width: Approximately 1000mm
線(xiàn)")
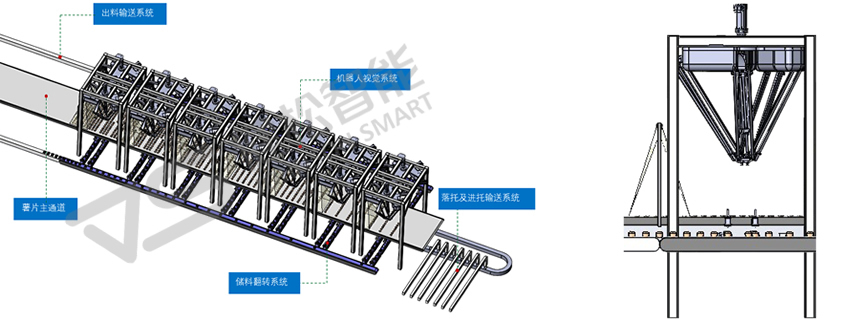
According to the project technical requirements proposed by the demand side, combined with on-site production conditions and process requirements, this plan plans to place 14 Delta robots (3+1 axis, working range 1100mm) side by side above the potato chip discharge conveyor belt. Machine vision will be used to accurately locate and identify potato chips, and a storage flipping system and discharge conveying system will be equipped to achieve efficient, flexible and automated recognition and sorting tasks of the robots.
Considering the shape, materials, and packaging stacking of baked potato chips, the plan is to:
Using advanced multi-layer adsorption end effectors, it can efficiently, conveniently, and uniformly absorb multiple potato chips in the same direction. (The size and number of layers of potato chips will depend on the specific production process requirements and system debugging. Estimated number of layers: 21.)
●Design parameters: End effector self weight<0.5kg.
●Sucking position: Above the surface of the baked potato chips.
Features: Multiple suction, one-time unloading and boxing. And, while absorbing potato chips, achieve their stacking. Efficient and convenient, fully leveraging the efficiency of robot automation work.
The positioning and detection of potato chips on the conveyor line is planned to use machine vision positioning, without the need for manual intervention, to achieve automatic and accurate recognition of the position of the workpiece to be grasped by the robot system. And each robot is equipped with a set of vision to ensure the stability and high-speed operation of each robot system to the greatest extent possible. Installation position: above the conveyor belt in front of each robot
Features: Adopting patented geometric pattern matching technology, it can locate components under difficult conditions and adapt to changes in rotation angle, proportion, and lighting conditions